Challenge: According to the characteristics of hybrid electric vehicles, a hybrid vehicle calibration system based on NI CompactRIO was developed. During the stage of bench and vehicle debugging, the system can be used to modify online calibration parameter variables inside the vehicle controller. In order to optimize the performance of the vehicle.
Application: Use NI's CompactRIO real-time controller, Labview Real-TIme, Labview FPGA, Labview RIO, and Labview Real-TIme ApplicaTIon tools to develop the automated test system.
Products used:
Labview 8.5 software development platform
Labview Real-TIme module
Labview FPGA module
Labview RIO module
NI CompactRIO-9014 with 128MB
DRAM real-time controller
NI CompactRIO-9104 8-slot reconfigurable
Embedded chassis
NI 9853 2-Port High-Speed ​​CAN Module
Introduction
Hybrid electric vehicles combine the advantages of traditional vehicles and electric vehicles. As a more mature new energy force, hybrid vehicles have been widely developed. Its vehicle controller (VCU) is used to realize vehicle energy management and power system control, and is the control center of hybrid vehicles. The control parameters in the VCU are one of the key factors to achieve the performance of hybrid vehicles, and corresponding optimization and calibration must be carried out.
The calibration of the vehicle electronic control unit is a very complicated process. On the one hand, it is due to the complexity of the working conditions of the controlled system; on the other hand, there is an influence between many control parameters. The optimization of the operating parameters and control parameters of the electronic control unit requires special tools for analysis and modification, and a calibration system for the electronic control unit was born. The selection of the calibration system is related to the calibration quality, calibration time and calibration cost. Therefore, the selection of a perfect and applicable electronic control unit calibration system is one of the key factors for the successful development of the electronic control system. Based on the above factors, the NI CompactRIO system was finally selected. On this platform, a hybrid vehicle calibration system was developed. Its compact shape can be placed in any free position in the cabin without affecting the vehicle space; the sturdy design makes driving in the car It can still run stably under severe working conditions; anti-interference measures can eliminate the impact of various interferences on the system during driving; Labview graphical programming language frees engineers from complex programming work, greatly shortening the development cycle ; Hot-swappable I / O modules with built-in signal conditioning make the system more open and flexible, and engineers can access the underlying hardware resources.
Hybrid electric vehicle design
The single-axle parallel hybrid scheme studied in this paper is a medium-hybrid front-driver
. After a lot of scheme selection and design, the engine, ISG motor, super capacitor and dual clutch are integrated. The disc-type integrated ISG motor is directly installed on the output end of the internal combustion engine crankshaft, the motor rotor and the engine crankshaft are directly connected, the stator is fixed on the engine body, and the motor replaces the flywheel and the original starter and generator.
The power of the hybrid power system of this solution is mainly driven by the internal combustion engine, and driven by the motor. The dynamic response of the internal combustion engine's power output is slow, and the torque output control accuracy is poor, while the motor's instantaneous power drive response is fast, the torque output control accuracy is high, and the energy recovery efficiency is high. Hybrid power control strategies such as starting, deceleration and fuel cutoff, acceleration assist, constant motor power generation and deceleration braking energy recovery.
Advantages of NI CompactRIO system
NI CompactRIO is a compact and rugged industrial control and acquisition system that uses reconfigurable I / O (reconfigurable I / O, abbreviated as RIO) and FPGA technology to achieve ultra-high performance and customizable functions. It contains a real-time controller and a reconfigurable FPGA chip suitable for reliable independent embedded or distributed application systems; it also contains hot-swappable industrial I / O modules with built-in signal conditioning that can be directly connected to sensors / regulators . This design makes the low-cost architecture open, and users can access the underlying hardware resources.
FPGA (Field Programmable Gate Array) is a product of the further development of programmable devices such as PAL, GAL, PLD, etc. Its logic function is completed by an array of logic cells arranged internally. The logic cell array includes three parts: a configurable logic module, an input and output module, and internal wiring. Engineers can use software programming to reconfigure the logic modules and I / O modules inside the FPGA to implement custom logic.
FPGA technology has many advantages, including custom I / O hardware timing and synchronization, high reliability, digital signal processing, and analysis. These advantages provide a flexible, low-cost solution to the rapidly growing automotive electronics test technology. FPGA can be directly connected to digital and analog I / O, and can define different sampling rates and triggers for each channel. Using FPGA technology, advanced signal processing and analysis can be performed on any sensor signal. In many signal processing systems, the underlying signal preprocessing algorithm has to process a large amount of data and requires high processing speed, but the algorithm is relatively simple and can be implemented by FPGA programming. In addition, various signal processing and analysis such as digital filtering operation, fast Fourier transform, windowing, etc. on the collected signals can be easily realized on FPGA.
System design
The calibration of the hybrid vehicle is different from the traditional engine calibration. Due to the more complicated working conditions and environment, the stability of the calibration system has higher requirements. The final development of the calibration hardware environment is shown in Figure 1. The communication master is composed of a portable PC and the NI CompactRIO system, and the communication is completed through TCP / IP; the communication slave is the msCAN of the vehicle controller. The calibration method uses CCP, a vehicle-based calibration protocol based on the CAN bus, so the NI CompactRIO system is connected to the vehicle controller via the CAN bus.
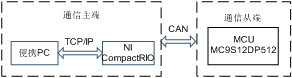
Figure 1 Calibration system hardware architecture
The CAN network of a hybrid vehicle is composed of 4 control units, including a vehicle controller (VCU—Vehicle Control Unit), an engine management system (EMS—Engine Manage System), a motor controller (MCU—Motor Control Unit), and information status Display controller (DPLY), all these control systems communicate via CAN bus. When designing the vehicle CAN network, a node was reserved for the vehicle CAN network monitoring at the development stage. The calibration system is also connected to the CAN network through this node to establish a connection with the vehicle controller VCU. The main control PC is the uppermost layer of the calibration system, which can monitor the CAN network data of the entire vehicle online, and modify the calibration parameters of the entire vehicle controller online, so as to perform unified control and management of the system. The CAN communication module uses the NI 9853 two-channel high-speed CAN acquisition module to collect the vehicle's CAN network signal with a resolution of 25ns and supports 11-bit and 29-bit arbitrary IDs. This solution has the characteristics of high integration, saves equipment investment, and enables calibration The working environment of the staff has been simplified.
System software design
The software design of the hybrid vehicle calibration system fully considers the hardware characteristics of the CompactRIO system. The software programming mainly includes three parts: the underlying FPGA program, the RT program, and the host computer host program.
The underlying FPGA program implements data acquisition of each board, transfer of correction coefficients of each IO channel, DMA transmission of data and RT, etc. The RT program is responsible for communication with the underlying FPGA, the indicator light of the RT system flashes, the control of the user switch, TCP / IP network communication with the host computer Host, FTP data transmission, and calibration, interpretation, and recording of test data. The Host program of the host computer is responsible for configuring the overall test system channel, communicating with the RT, and can monitor the specific channel of the acquisition board in real time, and view the data saved on the RT.
The entire software supports different sampling rates, supports CAN frame recording and conversion, and TDMS file format storage. The controller's data recording is displayed by the front panel indicator flashing, and can be suspended by the front panel custom switch. The system has expanded the U disk, and the data will be automatically stored in the U disk. After power off, just copy the data in the U disk to the host computer.
After developing the program running on the FPGA target in the Labview graphical language, compile the program and download the compiled file to the FPGA chip. The RT program can be downloaded to the NI CompactRIO real-time system through the Labview Real-Time Application tool, so that as soon as the system is powered on, the RT program will automatically run.
According to the basic functions of the calibration system, the host computer software is divided into the following modules: CAN communication control module, vehicle controller calibration module, CAN network data monitoring module. The main function of the CAN communication configuration module is to configure the relevant information of the CAN channel to drive the NI 9853 CAN card to send and receive CAN data; most of the calibration work is completed under the vehicle controller calibration module, which is to be executed In general, there are two tasks: read the data in the RAM area and display it on the PC, and download the data to the RAM area. Figure 2 shows the calibration interface. Each instruction in the calibration process is displayed on the front panel in the form of a control. When the user clicks on an instruction, the module should be able to receive the user's calibration instruction and start managing the corresponding thread. The main function of the CAN network data monitoring module is to process the entire vehicle CAN network message obtained by the CAN card, and finally display it on the monitoring interface. The CAN message obtained from the CAN card is still in the form of a data frame. In order to provide a friendly interface for the tester, it is necessary to convert between the decimal data and the binary data used in the controller. The ID number of the CAN message sent by the device is analyzed accordingly and displayed on the front panel as intuitively as possible, so that the R & D personnel can understand the working status of the vehicle, engine and motor in real time.
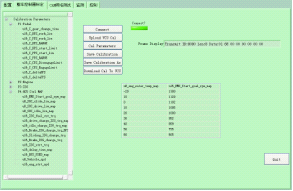
Figure 2 Calibration interface
in conclusion
There are multiple sources of interference in the car during driving, such as spark discharge caused by motor brushes, electromagnetic signals generated by pulse switch contacts in certain circuits, interference from various electrical equipment during operation, and so on. These noises have serious interference with the signal under test and the test equipment, which will lead to large data acquisition errors. Therefore, the anti-interference ability of the acquisition equipment is particularly important. Through long-term road tests of real vehicles, the anti-interference measures of the equipment can eliminate the influence of various interferences on the system during driving, ensure accurate and reliable collection of CAN network data of the entire vehicle, and perform online calibration of the vehicle controller parameters. Its real-time performance and reliability have been verified, and it fully meets the requirements of the hybrid vehicle calibration test. It plays a very important role in the debugging of hybrid vehicle control strategies.
Author: Shao Bin
Position: Test Engineer
Company: Shanghai Huapu Automobile
Application areas: automated testing
In-ear Wired Earphones, they are small and comfortable and simple, fit in just about any pocket,and they provide great sound that literally goes straight into your ears,bring it on your next commute or run, or simply enjoy it in the comfort of your time.
In-ear Wired Earphones
Earbuds With Removable Cable,Earphones With Replaceable Cabl,Stereo In-Ear Earphones,In-Ear Wired Headphones
Dongguang Vowsound Electronics Co., Ltd. , https://www.vowsound.com